
DCC
Decodificador de accesorios
En una maqueta digital aunque se puede mantener con algunos cambios el control analogico de desvios, señales y accesorios si se quieren controlar desde la central digital y poder establecer rutas o controlar la maqueta por ordenador necesitaremos un decodificador que lea la señal DCC de la central y active adecuadamente los accesorios o desvios. Normalmente un decodificador de accesorios controla 8 salidas para 4 desvios o señales.
Aqui podeis encontrar diferentes tipos de decodificadores de accesorios
| Accesorios | Decodificador para 4 desvios y señales o 4 semaforos |
| Desvios | Decodificador para desvios |
| Servos | Decodificador para 4 servos |
| ServoPoint | Deco para desvíos con un servo |
| Semaforos | Decodificadores para semaforos con encendido/apagado lento y flash |
| PAN-Sound | Decodificador DCC para paso a nivel con sonido |
| Perifericos DCC | Decodificadores con transistores, salida ajustable, etc. encadenados |
| MOT-VREG | Adaptadores para salidas deco accesorios |
|
Plataforma giratoria |
Decoder para plataforma giratoria |
|
DCC2DMX |
Decoder para iluminacion DMX |
|
KDaktion |
Decoder para Pulsador de accion |
| Decoders PpP | Decodificadores para semaforos, desvios, iluminacion. |


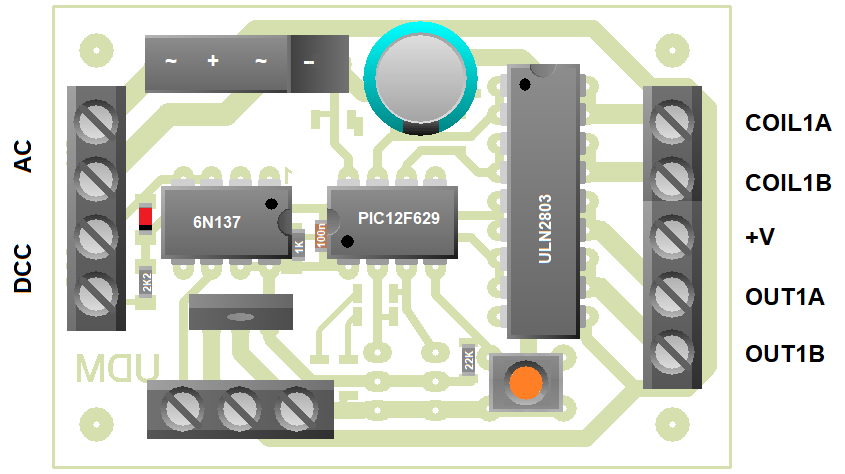
Decodificador para 4 desvios y señales
En la red existen varios diseños de decodificador de accesorios, los podeis encontrar entre otros en MERG, Estacion Digital, CTMS o Le monde du DCC
Basicamente todos son variaciones del mismo diseño con un PIC16F84 por lo que utilizan el mismo soft o con alguna variacion. Yo tambien he hecho mi propia variacion del diseño del decodificador añadiendole un pulsador que se ha de mantener pulsado durante la programacion del decodificador, asi no hay que ir desconectando los otros a la hora de programarlos y por soft lo he modificado para que las dos salidas que controlan un accesorio no se activen a la vez por lo que se puede usar tanto para desvios como para semaforos.

El esquema y el diseño de la placa podeis descargarlos aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales.
Para el montaje y comprobacion de fallos podeis seguir este paso a paso

He separado la entrada de datos DCC de la alimentacion para poder usar un transformador independiente para alimentar a los decodificadores de accesorios y no sobrecargar al booster, de esta manera solo consume del booster la corriente para activar el LED del optoacoplador. Si lo quereis alimentar desde el booster solo teneis que conectar la entrada de alimentacion a la entrada de datos DCC. El condensador de 2200uF permite tener una buena reserva de potencia para activar los desvios, el ULN2803 puede dar a sus salidas 500mA si necesitais mas corriente podeis soldar otro ULN2803 encima del existente en el circuito. Adicionalmente he colocado dos tomas de masa por si quereis usar pulsadores desde un panel para activar manualmente los desvios de esta manera:

Para programar el PIC16F84 podeis usar el archivo HEX que esta aqui u otro de los links anteriores. Si teneis una central Lenz, podeis usar un PIC16F628 y el archivo HEX que esta en MERG, en este caso no tendra utilidad el pulsador.
Para programar los decodificadores debeis apretar el pulsador cuando pulseis la tecla de programacion en la central, una vez programado se encendera el LED del decodificador. Los CV de los decodificadores comienzan en el CV513, aqui podeis ver los principales CV. El tiempo de activacion de las salidas sera de 10ms por el numero programado en el CV correspondiente, si programais un valor de 0 tendreis una salida fija (para los semaforos).
Mira en Colaboraciones las aportaciones a este diseño que me habeis enviado.
Semaforos con encendido/apagado lento 
Si quereis conseguir un efecto de encendido lento de las luces de vuestros semaforos podeis programar el PIC con el archivo que esta aqui para tener 4 semaforos rojo/verde con el que podreis escoger la luminosidad maxima y la velocidad de encendido, o tambien podeis controlar dos semaforos de 3 luces tipo RENFE con control de canton usando los decoders de accesorios con o sin el pulsador de permiso de grabacion.

Tambien podeis descargaros el manual y podeis ver un video de como funciona gracias a Peli
Decodificador para 4 servos v.2
Para mover los desvios y conseguir un efecto de movimiento lento se pueden usar los servos. Un decodificador para dos servos lo teneis en la pagina de Heiko Schroeter. que ademas permite gobernar el corazon polarizado de los mismos o el ServoPoint para un solo servo. Las placas para el mismo y la programacion de CV los podeis encontrar en Different-ways
Si no teneis necesidad de controlar el corazon polarizado del desvio podeis montar este decodificador que perimte controlar 4 servos en los que podeis programar su velocidad de desplazamiento y el angulo de movimiento.
Podeis usar la misma placa de Different-ways o mejor este otro esquema que ya incorpora el puente de diodos y es un montaje mas pequeño.

El programa y las placas podeis descargarlos aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.
Los conectores que llevan los servos varian segun la marca, aqui teneis algunos:

Carlos Viva me ha enviado su diseño para este decodificador de servos:


Mira en Colaboraciones las aportaciones a este diseño que me habeis enviado.
Decodificador para 2 servos y 2 reles
Haakon me pidio adaptar el soft del deco de 4 servos para tener un decodificador para dos servos que ademas permite gobernar el corazon polarizado de los mismos ya que cambia la posicion del rele al pasar por el punto medio.

Se puede programar la velocidad de desplazamiento y el angulo de movimiento de cada servo.
Las placas para el mismo y la programacion de CV los podeis encontrar en Colaboraciones con el nombre de Servopoint2. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.
Mira en Colaboraciones las aportaciones a este diseño que me habeis enviado.
ServoPoint
El problema de usar servos para mover los desvios es la manera de polarizar el corazon si se necesita, se puede hacer, por ejemplo, instalando un interruptor a modo de final de carrera. Otro problema es moverlos de forma manual ya que el deco de 4 servos no tiene pulsadores para moverlos de forma manual.
ServoPoint permite usar un servo y al llegar al final del movimiento dar un pulso para un pequeño rele biestable incorporado que permita polarizar correctamente el corazon, dejando otro interruptor libre para usar, por ejemplo, como señalizacion de la posicion del desvio, ademas mediante un pulsador se puede mover manualmente el servo.

El programa y las placas podeis descargarlos aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.


Salus fue el que me pidio que adaptase el soft del deco de 4 servos para mover los desvios y polarizar el corazon. Aqui teneis su diseño, el DEC-SRV1, que mejora el mio ya que esta optoacoplado y adaptado para mover desvios teniendo la electronica incorporada. Tambien podeis ver un video con su funcionamiento

ServoPoint_Opto
Version del ServoPoint con optoacoplador:

El programa y las placas podeis descargarlos aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.
ServoPoint 4p
Version del ServoPoint con 4 posiciones para el PIC12F629, PIC12F675 y PIC12F683:

El descodificador ServoPoint 4p es un descodificador de accesorios DCC especialmente creado para controlar un servo con 2, 3 o 4 posiciones y un relé independiente o ligado a las posiciones del servo.
El descodificador usa 3 direcciones de accesorios consecutivas. En la primera se mueve el servo a las posiciones A o B, en la segunda mueve el servo a las posiciones C o D. En la última cambia el relé si es independiente de las posiciones del servo o mueve el servo a la posición a la que está ligado el relé para que este cambie al llegar el servo a la posición
El programa y las placas podeis descargarlos aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales. Cuando programeis el PIC12F629 o el PIC12F675 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.
Decodificador para semaforos con encendido/apagado lento
Si quereis conseguir un efecto de encendido lento de las luces de vuestros semaforos podeis montar este pequeño decodificador para 2 semaforos rojo/verde con el que podreis escoger la luminosidad maxima y la velocidad de encendido, o tambien podeis controlar un semaforo de 3 luces tipo RENFE con control de canton o usarlo para controlar 2 semaforos de maniobras tipo RENFE
Si quereis mostrar mas aspectos o elegir las luces de vuestros senaforos podeis ver el nuevo UniSemaf . Si necesitais mas semaforos en un decoder podeis ver UniSemaf-648 o este otro montaje con el PIC 16F84 o 16F628
Podeis usar la misma placa de Different-ways o mejor este otro esquema que ya incorpora el puente de diodos y se puede alimentar tanto de la señal DCC como de un transformador.

El manual, las placas y el programa podeis descargarlo aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.
UniSemaf
Este decodificador de 4 luces permite tener hasta 8 aspectos diferentes con efecto de encendido lento de las luces y flash, pudiendo eligir a voluntad las luces y los aspectos programando adecuadamente sus CV. Estos son algunos semaforos que se pueden conseguir:

El manual, las placas y el programa podeis descargarlo aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado.
Este diseño está disponible como un repositorio de GitHub
UniSemaf-648
Decodificador de semaforos con hasta 8 luces y 32 aspectos totalmente configurables con el PIC16F648 (24 aspectos con el PIC16F628). Con efecto de encendido lento de las luces y flash, pudiendo eligir a voluntad las luces y los aspectos programando adecuadamente sus CV. Usa la misma placa que el decodificador de 4 desvios y señales

El manual y el programa podeis descargarlo aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales.
Este diseño está disponible como un repositorio de GitHub
UniSemaf25
El descodificador UniSemaf25 es un descodificador de accesorios especialmente creado para iluminación con diodos LED de señales semafóricas ferroviarias totalmente configurable y preconfigurado para varios tipos de señales. Tiene 5 salidas programables que se alimentan directamente del PIC que incorpora internamente las resistencias para los LED

De pequeño tamaño puede incorporarse en la base de la señal luminosa y se alimenta directamente de DCC, solo necesita dos cables. Puede usarse el PIC12F629 o el PIC12F683, este ultimo con mas tipos de señales preconfigurados.
UniSemaf25 usa cuatro direcciones digitales para los 8 aspectos. Puede ser que el mismo descodificador controle dos o mas semaforos o que dos descodificadores con el mismo numero controlen dos semaforos diferentes, en los casos que no se utilicen todos los aspectos en un UniSemaf25 se puede programar otro UniSemaf25 con las direcciones sobrantes.


El manual y el programa podeis descargarlo aqui. Cuando programeis el PIC12F629 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado. El PIC se debe programar con el archivo HEX correspondiente antes de montarlo en la placa.

Este diseño de decoder y semaforo 3D surge de la colaboracion de tres personas. El diseño 3D de todo el sistema lo ha desarrollado Isaac (iGuadix), el diseño y fabricación de la placa ha sido desarrollado por Josep Callarisa, mientras la programación ha sido desarrollada por mi (Paco Cañada). Este montaje se proporciona para ser desarrollado y montado por uno mismo y no tiene ningún afán comercial. En la página web de iGuadix encontrará toda la información al respecto, y los diferentes diseños de tipos de semáforo en 3D.
 |
Definicion del decoder UniSemaf25 para JMRI |
Este diseño está disponible como un repositorio de GitHub
SemafCoil
El descodificador SemafCoil es un descodificador de accesorios DCC especialmente creado para controlar una señal semafórica de dos luces y un desvío.
El descodificador usa 2 direcciones de accesorios seleccionables libremente. En la primera se cambia el aspecto de la señal semafórica (rojo/verde), en la segunda mueve el desvío (recto/desviado). La duración del pulso es programable hasta 4 segundos con lo que se puede usar con accionadores de desvío con bobinas o con motor.
El manual y el programa para el PIC 12F629, 12F675 o 12F683 lo podeis descargarlo aqui. Cuando programeis el PIC12F629 o el PIC12F675 tened en cuenta que se ha de conservar el valor de la ultima posición, por lo que quizás primero sea conveniente leer el PIC y apuntar el valor para luego comprobarlo una vez programado. El PIC se debe programar con el archivo HEX correspondiente.
Deco para 2 desvios
Sencillo decodificador para 2 desvios con el 12F629 con tiempo fijo de impulso de 0,5s. Para programar una nueva direccion, pulsar el boton y mover el desvio (direccion impar) que querais como primer desvio, el segundo adoptara la direccion siguiente (par)
El esquema, placa y el programa podeis descargarlo aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales.
Perifericos DCC


Salus ha diseñado estos decodificadores de accesorios que se pueden encadenar:
| DEC-TRN | Decodificador de accesorios a transistores para grandes consumos |
| DEC-AJT | Decodificador de accesorios con tension de salida regulable |
| DEC-RLE | Decodificador para 4 reles |
| DEC-SRV | Decodificador para 8 servos |
| DEC-MTR | Placa master para encadenar los modulos |
El diseño de estos decodificadores los teneis aqui. Los archivos HEX para programar los PIC los podeis descargar aqui.
MOT-VREG

Adaptadores para salidas deco accesorios:
| MOT | Adaptador para motores lentos tipo Lemaco, Tillig, Conrad o desvios tipo Kato... hasta 1A de consumo |
| VREG | Tension de salida regulable para accesorios, semaforos... de 4V a 12V y 1A |

Tambien se pueden unir para controlar un motor y regular su velocidad. El diseño de estos adaptadores los teneis aqui.
TT-F9152 - Decoder para plataforma giratoria

Con el decoder TT-F9152 puede controlar manual y digitalmente la plataforma giratoria, cada vía de salida realmente existente puede ser accedida directamente gracias a la capacidad de indexación. El puente puede ser girado hasta la siguiente vía de salida existente con un solo paso. También puede ser girado 180� con una sola orden.
Funciona en analogico o en digital (DCC o Motorola ), al poder ser controlada y programada desde los tres botones del panel de control o en digital con los comandos Marklin 7686.
Para las plataformas de 48 salidas Fleischmann 9152, 9152C, 6152, 6651C, Arnold 6381 y con las de 24 salidas Roco 35900 y con bricolaje en la Atlas N. El diseño de este decoder lo teneis aqui.
DCC2DMX - Decoder para iluminacion DMX

Muchas grandes maquetas tienen una iluminación ambiental con modulos de iluminacion DMX que les permite tener el foco de atención en el momento adecuado en una escena determinada o mediante la combinación de varios colores en la iluminación producir el efecto de amanecer y atardecer a una luz ambiente diurna o nocturna.

El DCC2DMX es un decodificador DCC que posee una salida DMX para controlar equipos de iluminación. Se controla como una locomotora DCC y con el mando de velocidad se regula la intensidad del canal, se pueden controlar directamente hasta 28 canales con las teclas de función, hay 4 canales adicionales para disponer de una iluminación automática que realiza la transición noche/día mediante la función de luz.

También se puede asignar una locomotora diferente a cada uno de los 32 canales, los canales no asignados los podremos seguir controlando con la locomotora master y la tecla de función correspondiente. Es posible almacenar y recuperar el estado actual de iluminación de los canales controlados por la dirección de locomotora master, de esta manera se pueden tener memorizadas diferentes escenas de iluminación.
Si usamos una dirección larga para la locomotora master, se podrá activar un modo en el que además de decoder de locomotoras se tiene un decoder de accesorios con el cual recuperaremos la escena o activaremos las transiciones día/noche.
El DCC2DMX se utilizo para la iluminacion noche/dia de la desaparecida maqueta Scopic Miniatur Barcelona

El esquema, placa y el programa podeis descargarlo aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales.
KDaktion - Decoder para Pulsador de accion

Una de las cosas que más llama la atención de las maquetas ferroviarias además de los propios trenes, son las escenas con animación o movimiento. Para que además el visitante pueda interactuar sobre la maqueta, se pueden distribuir por ella unos botones que al pulsar sobre ellos se ponga en marcha una animación determinada o durante un tiempo.
KDaktion (del alemán Knopfdruckaktion: Botón pulsador de acción) permite activar dos salidas digitales o servos durante un tiempo y con una secuencia programable de manera que se puedan realizar sencillas animaciones que den vida a la maqueta. También se puede establecer un tiempo de espera entre dos animaciones de manera que se favorezca el movimiento del público en la visita de la maqueta.
Cuando este iluminado el LED bicolor en verde se puede pulsar el botón para dar inicio a la animación, al pulsar, se apagará el LED verde y se iluminará el LED rojo indicando que se están realizando lassecuencias programadas en las salidas que pueden ser: mover el servo a una posición determinada, activar/desactivar las salidas digitales, repetir acciones un determinado numero de veces o esperas.
Una vez finalizadas las secuencias, el LED rojo parpadeará durante el tiempo programado durante el cual no se podrá iniciar la animación, una vez pasado el tiempo se iluminará el LED verde. Si se pulsa el boton mientras esta parpadeando el LED en rojo, parpadeará alternativamente en rojo y verde indicando que se iniciará de nuevo la secuencia tan pronto como acabe el tiempo de espera.

Es muy versatil ya que montando los componentes adecuados se pueden controlar dos servos (para mover una excavadora como la de la imagen), un servo y una salida, dos salidas, un servo y una entrada, o una salida y una entrada
El esquema, placa y el programa podeis descargarlo aqui, si quereis saber como fabricar las placas o identificar los componentes podeis leer uno de estos tutoriales.
Decoders PpP

| PpP-Sem2 | Decoder de semaforos 2 luces |
| PpP-Sem3 | Decoder de semaforos 3 luces |
| PpP-Sem4 | Decoder de semaforos RENFE de 4 luces |
| PpP-Des3 | Decoder para desvios triples y normales |
| PpP-LightFX | Decoder de efectos luminosos |
| PpP-Mot4 | Decoder para motores lentos |
| PpP-MotK | Decoder para desvios tipo Kato |
.gif)