de Corrado Malanga i Luciano Pederzoli
En primer lloc, és bo esmentar que els 3 eixos ortogonals (el mínim nombre necessari) d'un sistema clàssic de coordenades espacials, defineix, en parelles, 3 plans de coordenades, cadascun dividit encara més, mitjançant els seus dos eixos, en 4 quadrants ; aquest últim s'identifica per nombres que van d'1 a 4, disposats com els de la Figura 01 subjacent. Els tres plans de coordenades, al seu torn, defineixen 8 octants, numerades d'1 a 8 com es mostra a la mateixa Figura 01.
Suposem, ara, que siguem capaços de definir, fins i tot en aquest cas particular, el concepte de velocitat angular ω (com veurem més endavant), llavors es té en compte el sistema de coordenades ortogonal a què ens hem referit amb anterioritat denominat respectivament S, T i U i finalment suposem que hi ha una entitat composta R, en línia amb el principi, només de tres rotacions.
L'entitat R serà denominada ROTONE perquè consta d'una rotació pura i simple; considerem el ROTONE com el component clau de l'Univers.
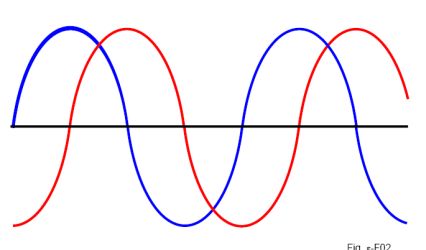
La seva descomposició al llarg dels tres eixos de coordenades produirà, com a conseqüència, tres velocitat angulars, ωS, ωT i ωU, un per a cada un dels eixos S, T i U (Figura 02).
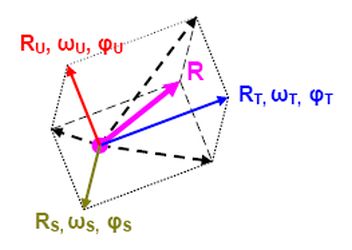
Els tres rotacions seran caracteritzades, cadascuna, per un mòdul, una velocitat angular i una fase, a les que anomenarem, respectivament : RS, ωS, φS; RT, ωT, φT i RO, ωU, φU. Cadascuna de les tres rotacions només pot existir (estat 1) o no existeix (estat 0), el que representa un bit en un sistema numèric binari; D'això es desprèn que mostra totes les combinacions de 3 bits, que s'enumeren en la següent taula a partir de la següent TAULA γ-a (obtinguda pel canvi d'un sol bit alhora) :
| Bit 3 ωU | Bit 2 ωT | Bit 1 ωS | Número de la combinació | Descripció i comentaris |
| 0 | 0 | 0 | 0 | Punt d'origen dels eixos (sense rotació) |
| 0 | 0 | 1 | 1 | Eix S (només un eix : Espai) |
| 0 | 1 | 1 | 3 | Plànol ST (dos eixos : Espai y Temps) |
| 0 | 1 | 0 | 2 | Eix T (un sol eix : Temps) |
| 1 | 1 | 0 | 6 | Plànol TU (dos eixos : Temps y Energia) |
| 1 | 0 | 0 | 4 | Eix U (només un eix : Energia) |
| 1 | 0 | 1 | 5 | Plànol SU (dos eixos : Espai y Energia) |
| 1 | 1 | 1 | 7 | Volum. STU Espai, Temps y Energia |
Les 8 combinacions (en realitat juliol + 1, l'origen dels eixos) representen tots els modes o modalitats d'existència , teòricament possibles per a un ROTONE.
Això, de fet, pot no rotar (manera "noaxial"), o pot rotar en 3 modalitats "uniaxials", o a 3 "biaxials" o 1 "triaxial".
No obstant això, la rotació al llarg d'un eix pot tenir lloc en una direcció (+1) o en l'altre (-1), o fins i tot no existir en absolut (0) : les manifestacions d'un ROTONE són llavors 27 (en realitat 26+1, l'origen dels eixos), agrupats en 8 maneres i mostrats en la següent TAULA γ-b.
| Bit 3 ωU | Bit 2 ωT | Bit 1 ωS | Número de la combinació | Descripció i comentaris |
| 0 | 0 | 0 | 00 (no contra) | Punt d'origen dels eixos (sense rotació) |
| 0 | 0 | 1 | 01 (no contra) | Eix S Espai+ |
| 0 | 0 | -1 | 02 (contra 01) | Eix S Espai- |
| 0 | 1 | 0 | 03 (no contra) | Eix T Temps+ |
| 0 | 1 | 1 | 04 (no contra) | Plànol ST 1º quadrant Espai+ Temps+ |
| 1 | 0 | -1 | 05 (no contra) | Plànol ST 2º quadrant Espai- Temps+ |
| 0 | -1 | 0 | 06 (contra 03) | Eix T Temps- |
| 0 | -1 | 1 | 07 (contra 05) | Plànol ST 4º quadrant Espai+ Temps- |
| 0 | -1 | -1 | 08 (contra 04) | Plànol ST 3º quadrant Espai- Temps- |
| 1 | 0 | 0 | 09 (sense anti) | Eix U Energia+ |
| 1 | 0 | 1 | 10 (no contra) | Plànol SU 1º quadrant Espai+ Energia+ |
| 1 | 0 | -1 | 11 (contra 19) | Plànol SU 1º quadrant Espai- Energia+ |
| 1 | 1 | 0 | 12 (no contra) | Plànol TU 1º quadrant Temps+ Energia+ |
| 1 | 1 | 1 | 13 (no contra) | V. STU 1º oct. Espai+ Temps+ Energia+ |
| 1 | 1 | -1 | 14 (no contra) | V. STU 2º oct. Espai- Temps+ Energia+ |
| 1 | -1 | 0 | 15 (contra 21) | Plànol TU 2º quadrant Temps- Energia+ |
| 1 | -1 | 1 | 16 (no contra) | V. STU 4º oct. Espai+ Temps- Energia+ |
| 1 | -1 | -1 | 17 (contra 22) | V. STU 3º oct. Espai- Temps- Energia+ |
| -1 | 0 | 0 | 18 (contra 09) | Eix U Energia- |
| -1 | 0 | 1 | 19 (no contra) | Plànol SU 4º quadrant Espai+ Energia- |
| -1 | 0 | -1 | 20 (contra 10) | Plànol SU 3º quadrant Espai- Energia- |
| -1 | 1 | 0 | 21 (no contra) | Plànol TU 4º quadrant Temps+ Energia- |
| -1 | 1 | 1 | 22 (no contra) | V. STU 5º oct. Espai+ Temps+ Energia- |
| -1 | 1 | -1 | 23 (contra 16) | V. STU 6º oct. Espai- Temps+ Energia- |
| -1 | -1 | 0 | 24 (contra 12) | Plànol TU 3º quadrant Temps- Energia- |
| -1 | -1 | 1 | 25 (contra 14) | V. STU 8º oct. Espai+ Temps- Energia- |
| -1 | -1 | -1 | 26 (contra 13) | V. STU 7º oct. Espai- Temps- Energia- |
Recapitulant, els modes (7+1) i les manifestacions (26+1) de l'existència d'un ROTONE són :
| 1 manera | i | 1 manifestació | de tipus "noaxial" | |
| 3 modes | i | 6 manifestacions | 3 + 3 "contra" | de tipus "uniaxial" |
| 3 modes | i | 12 manifestacions | 6 + 6 "contra" | de tipus "biaxial" |
| 1 manera | i | 8 manifestacions | 4 + 4 "contra" | de tipus "triaxial" |
En els 7 maneres, amb 13 manifestacions i 13 "antimanifestaciones", més la condició de "sense rotació".
La manifestació i la "antimanifestación" són tals que, sumant-se, s'esvaeixen completament i es converteixen en "no rotació".
Les 26+1 manifestacions representen, dins el sistema d'eixos ortogonals S, T i U, en totes les direccions possibles, que es mostren en la següent Figura 03, en què, per conveniència, es tracen a l'interior d'un cub format per 8 cubs (8 octants).
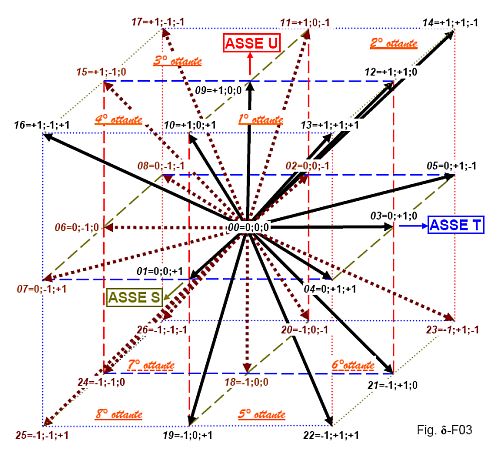
Les manifestacions números 05, 19, 21 i les "antimanifestaciones", números 07, 11 i 15, són anòmales biaxials, és a dir, amb discordança de senyal, i tenen la suma dels bits que componen igual a 0 (com el punt central , que és noaxial). Entre elles la possibilitat de triar entre la manifestació i la "antimanifestación" sembla totalment arbitrària, de fet, els sis, juntament amb el punt central, es troben en el pla "equatorial", que és la antimanifestación de si mateix, respecte a la diagonal que uneix els vèrtexs 13 i 26 (anti 13), les manifestacions, triaxials pures, és a dir, sense cap senyal de discrepàncies, tenen, respectivament, la suma de bits igual a +3 i -3.
Les manifestacions número 04, 10 i 12 tenen la suma dels bits que componen igual a +2, mentre que les sevas "antimanifestaciones" (08, 20 i 24) tenen la suma igual a -2 ; tots són biaxials també.
Les manifestacions nombre 01, 03, 09 representen la suma dels bits que componen igual a +1 , mentre els seus "antimanifestaciones" ( 02, 06 i 18) tenen la suma igual a -1 ; tots són monoaxiales també.
Les manifestacions nombre 14, 16 i 22 tenen la suma dels bits que componen igual a +1 , mentre que els seus "antimanifestaciones" (25, 23 i 17) tenen la suma igual a -1 , però totes elles són triaxials anormals.
Totes les característiques del ROTONE fins ara tractades (pures rotacions) es quantifiquen, com el seu camp de la variabilitat ie limitat als valors 1, 0 i -1.
És especialment important tenir en compte que fins i tot les maneres "uniaxials" de l'existència del ROTONE, mentre que es caracteritza per una de les propietats fonamentals (que són Espai, Temps i Energia), que posseeixen, però, TRES DIMENSIONS, el que hem anomenat x, y i z.
El ROTONE no pot ser un simple punt geomètric, ja que, si es fes rotar d'un punt geomètric perfecte, NO es podria distingir d'un punt fix.
La "velocitat angular" de la rotació del ROTONE és variable entre zero i infinit.
Hi ha tres maneres teòrics de rotació, que es distingeixen per la "velocitat angular" de rotació que el ROTONE posseeix cada un dels tres eixos:
1) Els tres eixos giren a la mateixa velocitat, mantenint una relació fixa de fase l'un amb l'altre.
2) Dos eixos giren a la mateixa velocitat, mantenint una relació fixa de fase l'un amb l'altre; el tercer eix roda a diferent velocitat.
3) Tots els tres eixos giren a diferents velocitats.
La relació de fase també és variable d'una manera contínua.
La rotació al voltant d'un dels tres eixos principals (S, T i U), per exemple entorn de l'eix U (Figura 01), una vegada que es projecta sobre els altres dos eixos, dóna lloc a dos oscil·lacions sinusoïdals, de mateixa amplitud i freqüència però en desfasament de noranta graus una respecte a l'altra, com els operadors "seno" i "cosinus" qualitativament mostren a la Figura 02.
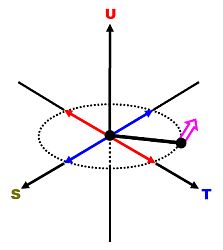
D'això es desprèn que la rotació segons l'eix U produeix efectes oscil·ladors sobre els eixos S i T. Naturalment, la rotació segons l'eix S produeix efectes oscil·ladors sobre els eixos T i U i la rotació segons l'eix T produeix efectes sobre els eixos U i S.
A l'eix U es podrà obtenir, al mateix temps, una rotació més dos oscil·lacions, un produïda per la rotació segons S (Us) i l'altra per la rotació segons T (Ut); en l'eix S es pot obtenir una rotació més les dues oscil·lacions, produïdes per les rotacions segons T (St) i segons U (Su), i finalment, en l'eix T, una rotació més els dos oscil·lacions, produït per la rotació segons U (Tu) i segons S (Ts).
És interessant observar que la presència simultània, en cada eix principal, d'una rotació i de dues oscil·lacions (al voltant dels altres dos eixos), permet la comparació de la freqüència i de fase entre les tres quantitats implicades i per tant també entre les rotacions segons els tres eixos principals.
En conclusió, els 3 rotacions segons els eixos principals poden ser reemplaçats per 6 oscil·lacions sinusoïdals, 2 per a cada eix : el ROTONE, que està formada per 3 rotacions, alternativament es pot considerar com composta de 6 oscil·lacions.
Cada oscil·lació sinusoïdal present en un eix principal es trenca, llavors, en els tres eixos secundaris (x, y, z), el que resulta en tres oscil·lacions, en funció de principi de diferent amplitud diferent una de l'altra.
Com que hi ha 6 possibles oscil·lacions segons els eixos principals, es dedueix que hi ha 18 possibles oscil·lacions en els eixos secundaris (TAULA ε-a), 6 per a cada eix.
| S | T | U |
| x | Stx | Sux | Tsx | Tux | Usx | Utx | y | Sty | Suy | Tsy | Tuy | Usy | Uty | z | Stz | Suz | Tsz | Tuz | Usz | Utz |
La rotació segons l'eix S està perfectament descrit per 6 oscil·lacions (Stx, Sux, Sty, Suy, Stz i Suz), que segons l'eix T dóna unes altres 6 oscil·lacions (Tsx, Tux, Tsy, Tuy, Tsz i Tuz) i segons l'eix U unes altres 6 oscil·lacions addicionals (Usx, Utx, Usy, Uty, Usz i Utz).
El conjunt de 18 oscil·lacions sinusoïdals formen el que s'anomena PULSONE.
En conclusió, el component fonamental universal, anomenat ROTONE, pot ser representat, sobre els eixos principals (S, T i U), per 3 rotacions, o, en els eixos secundaris (x, i, z), per un PULSONE, compost per 18 oscil·lacions sinusoïdals.
Entre un ROTONE i un PULSONE hi ha la mateixa relació que hi ha entre un vector en tres dimensions i un tensor per a més dimensions : el tensor, de fet, és una matriu de vectors i és capaç de fer una descripció geomètrica correcta polidimensional emprant la mateixes regles tal com s'utilitza per a un petit nombre de dimensions.