
DCC
Accessory Decoder
In a digital model can be maintained although some changes with the analog control of turnouts, signals and accessories, if you want to control from the command station and set routes or control from the computer, you will need a decoder to read the signal from the DCC command station and activate properly accessories or turnouts. Normally an accessory decoder controls 8 outputs for 4 turnouts or signals
Here you can find different types of accessory decoders
| Accessory | Decoder for 4 turnouts and signals or 4 semaphores |
| Turnouts | Decoder for turnouts |
| Servos | Decoder for 4 servos |
| ServoPoint | Deco for turnouts with servo |
| Semaphores | Decoders for semaphore with slow on / off and flash |
| PAN-Sound | DCC decoder for railroad grade crossing with sound |
| Peripheals DCC | Decoders with transistors, adjustable output, and so on. Chained |
| MOT-VREG | Adapters for accessory decoder outputs |
|
Turntable |
Turntable decoder |
|
DCC2DMX |
DMX lighting decoder |
|
KDaktion |
Action pushbutton decoder |
| PpP Decoders | Decoders for semaphores, turnouts, lighting. |


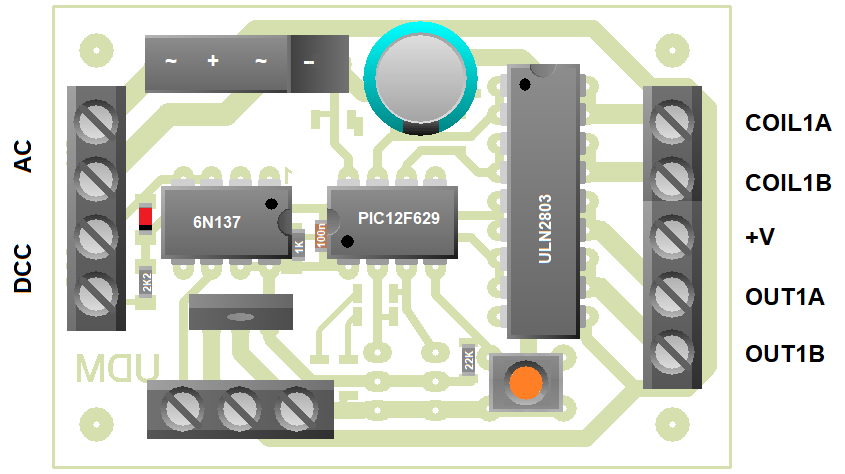
Decoder for 4 turnouts and signals
In Internet there are several designs of accessory decoders, can be found among others in MERG, Estacion Digital, CTMS or Le monde du DCC
Basically they are all variations of the same design with a PIC16F84 which use the same software or with some variations. I also I made my own variation of the design of the decoder by adding a button that has been pressed while you program the decoder, so we should not disconect the other when you program it and I've changed so that the two outputs that control an accessory are not activated at the same time so it can be used both for turnouts or semaphores.

Schematics and PCB design can be downloaded here, if you want to know how to make PCB or identify the components, you can read one of these tutorials.
For the assembly and testing of failures can follow this step by step

I have separate the DCC data entry to use a transformer to feed the accessory decoders and do not overload the booster, thus consuming only to power the optocoupler. If you want to feed from the booster only thing that connect the power input to DCC input. The 2200uF capacitor allowed to have a good reserve of power to activate the turnouts, the ULN2803 can give in their outputs 500mA if You need more power can weld another ULN2803 above the existing circuit. Additionally, I have placed twice ground connectors in case you want to use from a panel push buttons to activate manually turnouts like this:

To program the PIC16F84 can use the HEX file that is here or another of the links above. If you have a central Lenz, you can use a PIC16F628 and the HEX file that is in MERG, in this case does not need the pushbutton.
To program the decoders ought to press the button when push the programmingg key at the commnand station, once programmed the LED will light. The CV of decoders start in the CV513, here you can see the main CV. The time of activation of the outputs will be 10ms by the number programmed into your CV, if you program a value of 0, you'll get a fixed output (for the semaphore).
Take a look to Collaborations section the contributions to this design that you have sent me.
Semaphores with slow on / off 
If you want to get a slow ignition of the lights in your semaphore, you can program the PIC with the file that is here to get
4 semaphore red / green in which you will choose the maximum brightness and speed of light, or you can also control two semaphores or 3 lights type RENFE controlling the track, all using the accessory decoders with or without the permission programming pushbutton.

You can also download the manual and you can see a video of how it works, thanks to Peli
4 servo decoder v.2
To move the turnouts with a slow motion effect can be used servos. You can see a decoder for two servos on the page from Heiko Schroeter, it also allows controls the frog of the polarized turnouts or the ServoPoint for a single servo. The PCB and the CV programming can be found in Different-ways
If you have no need to control the frog of the polarized turnouts, you can mount this decoder that allow to control 4 servos in which you can set the speed of movement and the angle of movement.
You can use the same PCB from Different-ways or better this another scheme that already incorporates the bridge of diodes and is a smaller assembly

The program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials. When you prgram the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.
The connectors that carry the servos vary according to the brand, here you have a few:

Carlos Viva sent me his design for this decoder servos:


Take a look to Collaborations section the contributions to this design that you have sent me.
2 servos with 2 relays decoder
Haakon asked me to modify the 4 servo decoder software to get a 2 servo decoder with relays to control the frog of the polarized turnouts that changes the relay in the middle position.

you can set the speed of movement and the angle of movement.
The program and the PCB can be downloaded in Collaborations section with the name of Servopoint2. When you prgram the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.
Take a look to Collaborations section the contributions to this design that you have sent me.
ServoPoint
The problem of using servos to move the turnouts is the way to polarize the frog if needed, can be done, for example, by installing a switch as a final career. Another problem is to move them by hand because the 4 servo decoder has no buttons to move it manually..
ServoPoint allows to use a servo and at the end of the movement gives a pulse to a small bistable relay that permits properly polarize the frog, leaving another switch for free use, such as signaling the position of turnout, and with a pushbutton you can manually move the servo.

The program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials. When you prgram the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.


Salus was the one who asked me to adapt the software's of 4 servo decoder to move the turnout and polarize the frog. Here you have his design, the DEC-SRV1, which improves the mine because is optocoupled and adapted to move turnouts taking the electronics incorporated. You can also watch a video with its operation

ServoPoint_Opto
Version of ServoPoint with optocoupler:

The program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials. When you prgram the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.
ServoPoint 4p
Version of the ServoPoint with 4 positions for the PIC12F629, PIC12F675 and PIC12F683:

The ServoPoint 4p decoder is a DCC accessory decoder specially created to control a servo with 2, 3 or 4 positions and a relay independent or linked to the servo positions.
The decoder uses 3 consecutive accessory addresses. The first one moves the servo to positions A or B, the second one moves the servo to positions C or D. The last one changes the relay if it is independent of the servo positions or moves the servo to the position to the that the relay is linked so that it changes when the servo reaches the position.
The program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials. When you prgram the PIC12F629 or PIC12F675 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.
Decoder for semaphore with slow on / off
If you want to achieve a slow turn on of the lights of semaphores you can mount this small decoder for 2 red / green lights with which you can choose the maximum brightness and speed of ignition, or you can also control a 3-light RENFE type lights with track control or used to control 2 lights maneuvering semaphores type RENFE.
If you want to show more light aspects in your semaphores, you can see the new UniSemaf . If you need more semaphores at a decoder, you can see UniSemaf-648 or other circuit with PIC 16F628 or 16F84
You can use the same PCB from Different-ways or better this another scheme that already incorporates the bridge of diodes and can be powered from the DCC or from a power supply

The manual, program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials. When you prgram the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.
UniSemaf
This decoder allows 4 lights and up to 8 different aspects with slow effect of the lights and flash, and you can choose freely the lights and the aspects programming their CV. These are some semaphores that can be achieved:

The manual, program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials. When you program the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed.
This design is available as a GitHub repository
UniSemaf-648
Semaphore decoder with up to 8 lights and 32 fully configurable aspects with PIC16F648 (24 aspects with the PIC16F628). With slow effect of the lights and flash, and you can choose freely the lights and the aspects programming their CV. Uses the same PCB as decoder for 4 turnouts and signals

The manual, program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials.
This design is available as a GitHub repository
UniSemaf25
The UniSemaf25 decoder is an accessory decoder specially created for LED lighting of railroad signaling, fully configurable and pre-configured for various types of signals. It has 5 programmable outputs that are fed directly from the PIC that internally incorporates the resistors for the LEDs.

Small in size, it can be incorporated into the base of the light signal and is powered directly from DCC, it only needs two wires. You can use either the PIC12F629 or the PIC12F683, the latter with more preconfigured signal types.
UniSemaf25 uses four digital addresses for the 8 aspects. It may be that the same decoder controls two or more signals or that two decoders with the same number control two different signals In cases where not all aspects are used in a UniSemaf25, another UniSemaf25 can be programmed with the excess addresses.


The manual, program and the PCB can be downloaded here. When you program the PIC12F629 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed. The PIC must be programmed with the corresponding HEX file before mounting it on the board.

This decoder and 3D traffic light design arises from the collaboration of three people. The 3D design of the entire system has been developed by Isaac (iGuadix), the design and manufacture of the board has been developed by Josep Callarisa, while the programming has been developed by me (Paco Ca�ada). This assembly is provided to be developed and assembled by oneself and has no commercial purpose. On the iGuadix website you will find all the information about it, and the different designs of traffic light types in 3D.
 |
UniSemaf25 decoder definition for JMRI |
This design is available as a GitHub repository
SemafCoil
The SemafCoil decoder is a DCC accessory decoder specially designed to control a two-light signal and a turnout.
The decoder uses 2 freely selectable accessory addresses. In the first address the signal is changed (red/green), in the second address, the turnout is moved (straight/diverge). The pulse duration is programmable up to 4 seconds, which makes it suitable for use with coil or motor-driven turnouts.
The manual, program for the PIC 12F629 , 12F675 or 12F683 can be downloaded here. When you program the PIC12F629 or 12F675 keep in mind that it has to preserve the value of the last position, so it might be desirable to first read the PIC and save value and then check it once programmed. The PIC must be programmed with the corresponding HEX.
2 turnout decoder
Simple decoder for 2 turnouts with the 12F629 and fixed pulse time of 0.5s. To set a new address, press the button and move the turnout (odd address) you want as first turnout, the second will adopt the following address (even)
Schematics, program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials.
Peripheals DCC


Salus designed these accessory decodersthat can be chained:
| DEC-TRN | Accessory decoder with transistor for big loads |
| DEC-AJT | Accessory decoder with variable output voltage |
| DEC-RLE | Decoder for 4 relays |
| DEC-SRV | Decoder for 8 servos |
| DEC-MTR | Master board to chain the modules |
The design of the decoders you have here. HEX files to program the PIC can be downloaded here.
MOT-VREG

Adapters for accessory decoder outputs:
| MOT | Adapter for slow motion motor type Lemaco, Tillig, Conrad or Kato type turnouts... up to 1A |
| VREG | Output voltage regulated for accessories, semaphores... from 4V to 12V and 1A |

It can be joined to control a motor and its speed. The design of the adapters you have here.
TT-F9152 - Turntable Decoder

With the TT-F9152 decoder you can control the turntable manually and digitally, each really existing track can be accessed directly thanks to the indexing capacity. The bridge can be rotated to the next existing track with a single pass. It can also be rotated 180� with a single command.
It works in analog or digital (DCC or Motorola), being able to be controlled and programmed from the three buttons of the control panel or in digital with the commands Marklin 7686.
For the 48 track turntables Fleischmann 9152, 9152C, 6152, 6651C, Arnold 6381 and with the 24 tracks Roco 35900 and with little work in the Atlas N. You can find the design of this decoder here.
DCC2DMX - DMX lighting decoder

Many large models have ambient lighting with DMX modules that allows them to have the focus of attention at the right time in a particular scene or by combining several colours in lighting, the effect of sunrise and sunset to a light day or night ambient.

The DCC2DMX is a DCC decoder that has an output to control DMX lighting equipment. You control it as a DCC locomotive and the speed control regulates the intensity of the channel, you can directly control up to 28 channels with function keys, has 4 additional channels to provide automatic day/night lighting transition with the light function.

We can assign a different locomotive for each of the 32 channels, channels not assigned can continue to be controlled with the master locomotive and the corresponding function key. You can store and retrieve the current status of the lighting channels controlled by the master locomotive address, so you can have different preset lighting scenes.
If we use a long address for the locomotive master, you can enable a mode that besides the locomotive decoder has an accessory decoder with which to retrieve scenes or activate day / night transitions.
The DCC2DMX was used for the night/day illumination of the missing Scopic Miniatur Barcelona model railway

Schematics, program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials.
KDaktion - Action pushbutton decoder

One of the things that attracts the attention of the railway models in addition to the trains themselves, are the scenes with animation or movement. So that the visitor can also interact on the model, you can distribute some buttons that press on them to start a certain animation or runs for a while.
KDaktion (from German Knopfdruckaktion: Action pushbutton) allows you to activate two digital outputs or servos for a while and with a programmable sequence so that you can make simple animations that give life to the model. You can also set a waiting time between two animations so that the movement of the public is favored during the visit of the model.
When the two-color green LED is illuminated, the button can be pressed to start the animation, when pressed, the green LED will turn off and the red LED will light indicating that the programmed sequences are being performed on the outputs that can be: move the Servo to a certain position, activate / deactivate the digital outputs, repeat actions a certain number of times or wait.
Once the sequences are finished, the red LED will flash during the programmed time during which the animation cannot be started, once the time has elapsed the green LED will illuminate. If the button is pressed while the LED is flashing in red, it will flash alternately in red and green indicating that the sequence will start again as soon as the timeout period expires.

It is very versatile since by mounting the appropriate components you can control two servos (to move an excavator like the one in the image), a servo and an output, two outputs, a servo and an input, or an output and an input
Schematics, program and the PCB can be downloaded here, if you want to know how to make the PCB or identify the components can read one of these tutorials.
Decoders PpP

| PpP-Sem2 | 2 lights semaphore decoder |
| PpP-Sem3 | 3 lights semaphore decoder |
| PpP-Sem4 | RENFE 4 lights semaphore decoder |
| PpP-Des3 | Accessory decoder for single and triple turnouts |
| PpP-LightFX | Lighting effects decoder |
| PpP-Mot4 | Accessory decoder for motor turnouts |
| PpP-MotK | Accessory decoder for single coil Kato turnouts |
.gif)